Robotlar Öz-Gözlem Yoluyla Hareket Etmeyi Öğreniyor
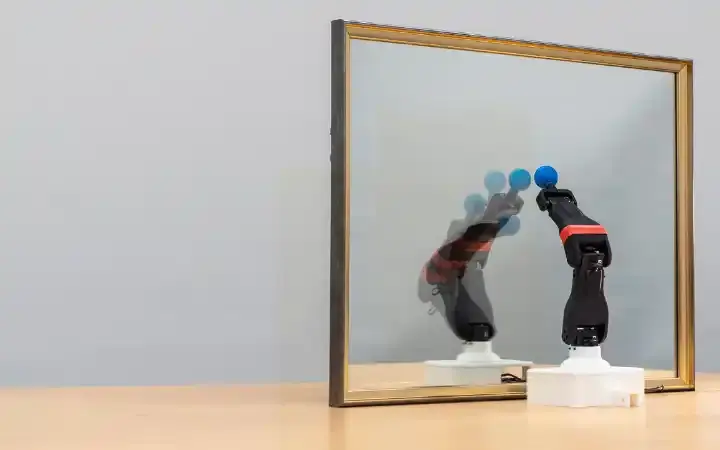
Columbia Üniversitesi'ndeki araştırmacılar, tamamen kendi hareketlerini izleyerek yeni hareketler öğrenebilen ve hasara uyum sağlayabilen otonom bir robot kolu geliştirmeyi başardılar. Robot, kendisini izlediği bir videodan verileri kullanarak bir sonraki hareketlerini planladı; bu pratiğe araştırmacılar tarafından "kinestetik öz-farkındalık" deniyor. Kendi hareketlerini gözlemleyerek, robotlar bedenlerindeki hasarları aşmayı öğrenebilirler ve bu da onları çok çeşitli uygulamalar için daha uyarlanabilir hale getirir. Bu benzersiz öğrenme süreci, insanların kendilerini aynada izleyerek belirli hareketleri nasıl ayarladıklarını taklit edecek şekilde tasarlanmıştır. Robotları bu şekilde öğrenmeye öğretmek, özel 3D simülasyonlarda yoğun eğitim ihtiyacını azaltabilir. Ayrıca, gelecek otonom robotlarını, gerçek dünyada zarar ve çevresel değişikliklere daha iyi uyum sağlamak için devam eden insan müdahalesi olmaksızın donatabilir.
Önemli noktaları göster
- Columbia Üniversitesi'ndeki araştırmacılar, kendisini izleyerek insan gibi öğrenen ve uyum sağlayabilen bir robot kol geliştirdiler.
- Robot, geçmiş hareketlerini analiz eden videolar kullanarak gelecekteki hareketlerini planlamak için "kinestetik öz-farkındalık" olarak bilinen bir yöntem kullanır.
- Bu teknoloji, robotun sürekli insan yeniden programlamasına ihtiyaç duymadan mekanik hasarlara kendi kendine uyum sağlamasına yardımcı olur.
-
- Deneyler, robot kolun, kendisini izledikten sonra engelleri dolaşmak ve simüle edilen hasarı bile telafi etmek için davranışını ayarlayabildiğini gösterdi.
- Sistem, koordinat kodlama, hareket ve en etkili hareketleri hesaplamak için bir tahmin modeli içeren üç sinir ağının bulunduğu bir ağa dayanmaktadır.
- Teknik, bir kamera kullanarak gerçekçi bir öz-model oluşturarak karmaşık simülasyonlara ve kapsamlı eğitime olan ihtiyacı azaltmayı amaçlar.
- Bu yaklaşımın, robotların bakım ve endüstriyel görevler gibi zorlu ortamlarda daha bağımsız ve verimli çalışabileceği yeni olanaklar açması bekleniyor.
Aynaya Bakan Çocuklar ve Dansçılardan Öğrenmek
İnsanlar, yansımalarımızdan tanıyıp öğrenme yeteneğini evrimleştirmiş az sayıdaki hayvan türlerinden biridir. Küçük çocuklar, tuhaf yeni bedenlerini aynalarda veya su birikintilerinde keşfeder, gördüklerini not alır ve kendilerine ait "zihinsel bir model" oluştururlar. Bu gözlem hareket, koordinasyon ve erken dil becerilerinin gelişimine yardımcı olabilir. Araştırmacılar, bu süreci "öz simülasyon" olarak adlandırıyor ve bu süreç sadece çocuklar için değil, aynı zamanda postürlerini düzeltmek ve anında görsel geri bildirim almak için düzenli olarak yansımalarını analiz eden dansçılar için de geçerlidir. Bu çalışma için araştırmacılar, benzer bir öz simülasyon sürecini otonom bir robota uygulamanın bir yolunu bulmak istediler. Genellikle, robotları çalıştıran AI modellerini son derece detaylı ve düzenlenmiş sanal simülasyonlarda eğitirler. Ancak kapsamlı eğitim turlarını tamamladıktan sonra model genellikle fiziksel bir makineye uygulanır. Fakat bu süreç birkaç şekilde sınırlıdır. İlk olarak, ileri düzey simülasyonların ustalaşması zaman alıcıdır ve genellikle geniş mühendislik uzmanlığı gerektirir. Ayrıca dalgalanabilirlik açısından biraz sınırlıdırlar. Eğitim aldığı simülasyonun parametreleri dışındaki fiziksel dünyada robota beklenmedik bir şey olduğunda, uygun şekilde yanıt vermekte zorlanabilir. Columbia Üniversitesi'nde doktor adayı olan ve çalışmanın baş yazarı Yuhang Hu, "Amacımız, bedenini anlayan, hasarları adapte eden ve sürekli insan programlaması olmadan yeni beceriler öğrenen bir robot oluşturmak" dedi. Bunu başarmak için, araştırmacılar "üç ayrı derin sinir ağından oluşan yeni bir kendini denetleyen öğrenme çerçevesi" geliştirdiler. Koordinat kodlayıcı, tek bir kamera tarafından yakalanan robotun ham video görüntülerini işlemekle işe başlar, araştırmacılar bu süreci, bir insanın kendisine aynada bakmasına benzetmektedirler. Hareket kodlayıcı, daha sonra robotun eklemlerini ve diğer hareket alanlarını vurgulayan verileri içeren bu görüntüyü iki boyutlu bir resme dönüştürür. Son olarak, tahmin modeli, fiziksel robot kolunu gerçek dünyada hareket etmeyi öğretmekle süreci tamamlar. Sonuç olarak, sanal eğitim simülasyonlarına güvenmek yerine, kameradan gelen video verilerine dayalı olarak hareketlerini sürekli olarak ayarlayabilen bir robot ortaya çıkar.
Robot Kol, Hareket Halindeyken Hasara Uyum Sağlıyor
Araştırmacılar, yeni öğrenme çerçevesini bazı temel görevlerle robot kolda test ettiler. İlk olarak, robot kolun basitçe kendisini barikatı aşarken başarıyla manevra ettiği bir video klibi izleyerek bir engelden (bu durumda kartonsu bir bölücü) kaçabildiğini gösterdiler. Daha ilginç bir şekilde, aynı modelin robota hasara uyum sağlamasına nasıl yardımcı olabileceğini de gösterdiler. Araştırmacılar, robotun, ağır bir yük nedeniyle bir uzvunun büküldüğü hipotetik bir senaryoya nasıl tepki vereceğini görmek istediler. Bunu denemek için, 3D yazıcıyla bir hasarlı uzvu yazdırdılar ve robota bağladılar. Yeni koluyla kendisini izleyen model, tahminlerini iyileştirip simüle edilen hasarı telafi etmek için robotun hareketlerini ayarlayabildi. Araştırmacılar, araştırma makalesinin bir ön baskı versiyonunda, "Sonuçlarımız, bu kendi kendine öğrenen simülasyonun, sadece hassas hareket planlamayı değil, aynı zamanda robotun uyumsuzlukları tespit edip hasarlardan iyileşmesini sağladığını" yazdı.

Öz-Simülasyon, Gelecekte Otonom Robotların Daha Az İnsan Müdahalesiyle Çalışmasını Sağlayabilir
Araştırma makalesinde gösterilen öz-simülasyon yöntemi, gelecekte otonom robotların geniş bir yelpazede kullanılmalarını geliştirebilir; bunlar bir gün üretim çalışmalarından çevresel ve endüstriyel izlemeye kadar çeşitli görevlerde konuşlanabilir. Bu robotların kamera verilerinden öğrenme ve hatta hasarlara uyum sağlama yeteneği, arıza sürelerini azaltabilir ve insan tamiratçılarının potansiyel olarak tehlikeli durumlara gereksiz yere maruz kalmasını önleyebilir. Öz-tamir yetenekleri, yaşlı ve çocuk bakımında robotlarla desteklenen alanlar gibi bazı alanlarda giderek daha önemli hale gelebilir; çünkü makinelerdeki bir hasar birinin iyi hali üzerinde hemen etkili olabilir. Bu yaklaşımın daha olağan avantajları da vardır. Örneğin, araştırmacılar, öz-tamir edebilir bir vakum robotunun, teorik olarak, bir duvara çarptıktan ve uzuvlarından birini biraz yerinden oynattıktan sonra hareketlerini ayarlamak için bu teknikleri kullanabileceğini belirtiyorlar. Başka alanlarda, dağınık dairelerde dolaşan sakar Roomba robotları bir gün daha iyi bir şansa sahip olabilir. Columbia Üniversitesi profesörü ve çalışmanın ortak yazarı Hod Lipson, "Biz insanların sürekli bu robotlara bakması, kırık parçalarını onarması ve performanslarını ayarlaması pahalıya mal olur. Robotlar, kendi bakımlarını nasıl yapacaklarını öğrenmelidir," dedi.